-
조작적 조건형성 - 스키너 상자 Skinner Box김학성의 심리학 이야기 2019. 5. 28. 16:02
심리학자들은 왜이렇게 상자를 좋아할까?
Pavlov도 크게 보면 각종 예외 변수를 통제 하기 위한 '하나의 방'에서 실험을 했고. Thorndike도 고양이를 '문제 상자'에 넣어서 실험을 했어. Skinner는 어떨까?

미국에서 태어난 Skinner의 심리학 뿌리는 행동주의 심리학의 아버지 J.B. Watson에게 있어. 당대 최고의 심리학자 였던 Watson의 책을 읽고 심리학에 입문하게 되었으니까 말야. Watson을 이어서 Skinner도 행동주의 심리학의 최고가 돼. 이번 글에서는 그의 가장 유명한 실험이었던 스키너 상자, Skinner Box 실험을 볼거야.
내가 이 글을 쓰기 위해 인터넷에서 자료도 많이 찾아보고 책도 많이 뒤져보았는데.. 자료가 의외로 무지 적었어. 왜인지는 모르겠지만.. 그래서 전공서를 다 뒤지고 관련 논문도 다 뒤지고 최대한 내가 아는 매체 중에서 자세히 다루어 써 보려고 해. 물론 이해하기 쉽도록 풀어서 쓸거야! 고맙지? ㅋㅋ 그 만큼 이 실험은 Pavlov의 고전적 조건형성 이론과 더불어 도구적 조건형성은 심리학에서 가장 중요한 이론이기도 하니까!
먼저 Skinner상자가 어떻게 해서 생겨났는지 이야기 해 볼게.
Thorndike의 문제상자 연구가 진행될 무렵, Atlanta에 있는 Clark Atlanta 대학의 W.S. Small은 쥐를 가지고 하는 심리학사 최초의 미로실험을 하고 있었어. 이 실험에서 쥐가 쓰인 이유로는 쥐가 어둡고 복잡한 쥐굴에 살기때문에 미로 실험을 잘 해낼 수 있을거라 생각했기 때문이야. Small은 쥐의 미로를 만들기 위해 영국 Hampton 궁전의 야외 미로를 떠올렸어.



<좌-영국 Hampton Court 미로, 중-Small이 고안한 미로, 우-더 간단해진 미로>
쥐는 미로 중앙에 있는 먹이를 찾으면 돼. Small은 쥐가 먹이를 찾는데 까지 걸리는 시간과 함께 얼마나 많이 막다른 곳으로 가는지 관찰하였어. 실험이 계속 되면서 미로가 너무 복잡하다는 생각이 들었어. 미로가 이렇게 까지 복잡하지 않아도 된다고 생각한 Small은 다시 미로를 고안해 냈어. 계속 계속 단순해지던 미로가 결국에는 단 한번의 회전만으로도 학습이 가능한 T-미로T-Maze로 까지 만들어졌어. 어디서 많이 봤지? 그런데! T-미로 마저 복잡하다고 생각한 실험자들은 직선 미로Straight-Alley Maze를 고안해 냈고 이 미로에서는 단순히 쥐가 달리는속도만으로도 관찰이 가능했어. 더이상 미로가 아니게 된거지..
Skinner또한 이 직선 미로에서 실험을 하였어.
처음에는 한쪽에 쥐를, 한쪽에 먹이를 놓고 실험을 했어. 하지만 이 구조는 쥐가 먹이가 있는 쪽에 다다를 경우 다시 제자리도 돌려 놓아야 하는 수고가 필요했어.
그래서!
쥐가 먹이가 있는 쪽에 도착할 경우 반대 편에서 먹이를 주어 쥐가 스스로 돌아오게 끔 고안해 냈어. 일이 하나 줄었지.
그리곤 쥐가 도착하는 것을 감지하여 자동으로 먹이를 주는 공급장치를 만들게 되었어. 훨씬 편해졌지.
쥐가 먹이가 있는 쪽으로 달려가면 자동으로 먹이가 나오고 또 반대편에 다시 먹이 공급장치가 나타나고 그 먹이를 먹기 위해 쥐는 다시 뛰어가고..
이러한 실험의 반복이었어. 얼마나 지루했을까?
그래서 Skinner는 차라리 쥐를 한 공간안에 가두어 놓고 그 공간 안에서 쥐가 먹이를 먹도록 실험하기로 했어. 통로가 더이상 필요하지 않다고 생각한거지. 스키너 상자 Skinner Box의 탄생이야! 한번 구조를 볼까?
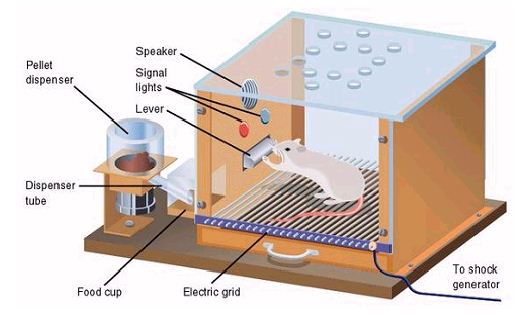
Skinner는 처음부터 쥐가 레버를 누를 수 없다는 것을 알았어. 그래서 스키너는 처음부터 차근차근 실험해 나가기로 하였어.
처음에는 상자에서 먹이가 주기적 간격으로 공급되게 하였어. 쥐가 먹이통에서 먹이가 나오자 마자 먹을 수 있도록 훈련하기 위해서야. 이는 나중에 쥐가 레버를 눌러 먹이를 누를 때 지연 시간을 최소화 하기 위한 단계야.
이제 쥐가 먹이통에서 먹이가 나온다는 것을 충분히 학습 했을 때 Skinner는 먹이와 함께 불빛을 제시했어. 이 불빛은 왜 제시했을까? 이유는 나중에 알아 보도록 할게.
이제 Skinner는 쥐가 레버를 직접 누르도록 만들고 싶었어. 그러면 주기적으로 먹이를 줄 필요 없이 쥐가 알아서 레버를 누르고 먹이를 먹는 것만 관찰하면 되니까. 하지만 앞발로 레버를 누르는 것은 쥐에겐 매우 일상적이지 않은 일이야. Thorndike의 문제 상자를 떠올려 볼까? 고양이가 어쩌다 뒷걸음질 쳐서 레버를 건드리는 것과는 차원이 달라. 쥐는 뒷발로 일어서서 앞발로 레버를 눌러야만 하는 행동을 해야 하는거야. 우연히 일어날 수 없는 일이지. 그래서 Skinner는 생각을 했어. 어떻게 쥐가 레버를 누르게 할 수 있을까? Skinner는 어떻게 쥐가 레버를 누르게 했을까?
처음에는 쥐가 레버쪽으로 몸을 돌리기만 해도 먹이를 주었어. 쥐가 레버쪽으로 먹이를 주는 행동은 우연히 일어날 수 있는 행동이야. Thorndike의 고양이와 같아. 그리고 쥐가 레버쪽으로 몸을 돌려 먹이를 먹는 것을 충분히 학습 했을 때, 이번에는 레버에 다가갔을 때만 먹이를 주었어. 이 훈련 또한 여러차례 반복되어야 했지. 다음으로 레버를 건드릴 때 만 먹이를 주도록 하였어. 그 다음에는 레버에 앞발을 얹었을 때만 먹이를 주었어. 그리고 마침내! 레버를 눌렀을 때 먹이를 주었어! 책에는 안나와 있지만 정말 힘든 과정이었겠지..? 실험자들은 쥐에게 눈을 뗄 수도 없어.. 행동 즉시 먹이를 주어야 그 행동에 대한 보상이 제대로 이루어질 수 있기 때문이야. Thorndike의 실험만 해도 고양이를 40번 넣었다 뺐다 했는데.. 쥐는 얼마나 오래 걸렸을까..
여기서 중요한 용어가 등장해. 바로 '조성造成:Shaping' 이야. 드물게 일어나는 어떠한 행동을 빈번하게 하게끔 만드는 것. 조성.
쥐는 이제 레버를 누르면 먹이를 먹을 수 있다는 것을 학습하게 되었어. 대단하지?! 쥐가 밥을 먹으려고 손잡이를 눌르는 모습이! 그 과정을 보지 못한 사람들은 매우 신기 하겠지만 그 과정은 매우 지루하고 험난했지.. ㅠ.ㅠ

그리고 Skinner는 쥐가 레버를 누르는 반응에 대해서 '조작반응操作反應:Operant'이라고 불렀어. 쥐들이 레버를 '조작'해서 먹이를 나오게 한거 기억나지? 조작반응, 조작행동 모두 같은 용어야. '쥐가 레버를 누르는 행동'이 '쥐가 레버를 조작' 한 거니까..
그럼 Pavlov의 고전적 조건형성과 무엇이 다를까? 쥐가 레버를 눌러 밥을 먹는것과 개과 종소리를 듣고 침을 흘리는 것.. 바로 쥐와 개의 행동 변화야! 쥐는 레버를 누르는 행동을 했고 개는 침을 흘리는 행동을 했어. 이 행동들이 조작 가능할까? 이제 Skinner는 쥐에게 레버를 누를 수 있게 하였지만.. Pavlov의 개는? 침을 흘리는 것이 강화 될 수 있을까?
개의 생각 - '내가 침을 흘리면 먹이가 나올거야.. 난 침을 흘려야지 흐흐흐.. 침샘아 빨리 반응해라!!'
안돼.
이것이 Skinner의 쥐와 Pavlov의 개의 차이점이야. 그리고 또 하나의 조건형성이 등장하는거야. 바로,
'조작적 조건형성操作的 條件形成:Operant Conditioning'이야. 혹은 '도구적 조건형성'이라고 불려. 조작적 조건형성, 도구적 조건형성 모두 반응으로 부터 결과가 나오기 때문에 두 용어는 같이 쓰여.
이제 도구적-조작적 조건형성이 뭐지 알겠지? 고전적 조건형성과의 차이점도?
'김학성의 심리학 이야기' 카테고리의 다른 글
게슈탈트 심리학 Gestalt Psychology (1) 2019.05.28 강화와 처벌 - 1부 : 강화, 처벌 그리고 소거 (0) 2019.05.28 도구적 조건형성 - 쏜다이크의 문제상자 Thorndike (1) 2019.05.28 왜 나는 따라하는가? Asch의 동조 실험 (0) 2019.05.28 엘리스의 합리적 정서행동상담 REBT - ABC 모델 (0) 2019.05.28